| Связанные с базовой точкой |
Эти СК, связанные с базовой точкой (BP) или PMU, имеют 4 разновидности:
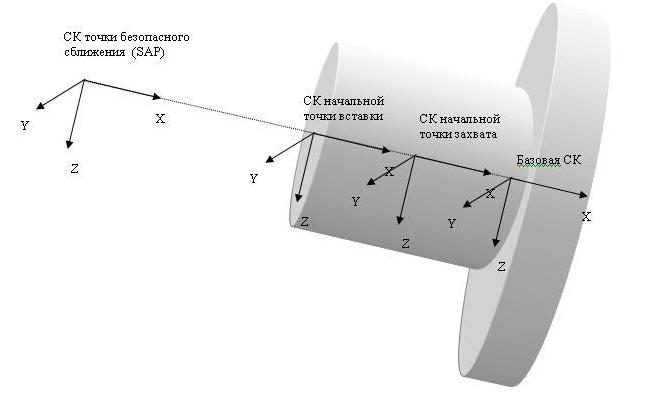
- базовая система координат (Basic Frame); она определяет действительное положение объекта после стыковки, т.е. сдвиг – по определению 0,
- начальная точка захвата/защелкивания (Grapple/Latch Start Frame): точка, в которой может начинаться действие захватывания; обычно расположена примерно на 25 мм выше плоскости интерфейса,
- начальная точка вставления (Insert Start Frame): точка, в которой заканчивается действие приближения и начинается Точное вставление; обычно расположена примерно в 50 мм над плоскостью интерфейса,
- точка безопасного сближения (Safe Approach Frame): точка, в которой начинается движение сближения (приближения). Обычно расположена примерно в 1200 мм над плоскостью интерфейса 
СК начала отсчета (СК0) линейных и угловых (декартовых) координат различных объектов. В качестве СК0 наиболее часто используются:
- СК корня КМР (BAF) – жестко связана с основанием КМР,
- целевая СК (TAF).
СК отсчета (FOR) – одна из СК, связанных с КМР или захваченным ПГ. FOR служит для определения положения и ориентации КМР (относительно СК0).
СК TIP КМР – служит для определения линейных и угловых координат ЕЕ КМР относительно СК0; жестко связана с TIP EE КМР. При нулевых значениях всех углов шарниров оси СК TIP параллельны осям BAF.
Целевая СК (TAF) – служит для задания координат соответствующей целевой точки.
Командная СК (CDF) – СК, начало которой совмещено с началом FOR, а оси параллельны СК МКС (внешняя CDF) или СК КМР (внутренняя CDF).
|